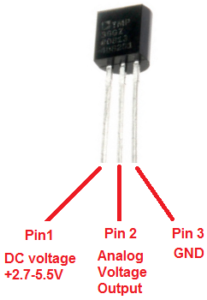
Afin de récupérer une température avec un Arduino, nous pouvons utiliser un capteur TMP36. Ce capteur doit-être alimenté entre 2.7 et 5.5V, et consomme moins de 50µA en fonctionnement, et 0.5µA en veille Attention au branchement de ce capteur. S’il est branché dans le mauvais sens, il risque de chauffer très vite et à de […]
Capteur de tempétature TMP36 – Arduino