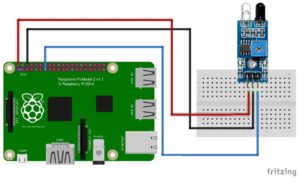
Une capteur de luminosité (ou photorésistance) est un composant électronique, dont la résistivité varie suivant le niveau de luminosité. Nous utilisons le Lux comme unité de mesure du flux lumineux. Plus l’éclairement sera intense, plus la tension au borne de la photorésistance sera grande. Luminosité : Exemple : 0.002 lux Nuit par temps clair, […]
Capteur de luminosité – Arduino