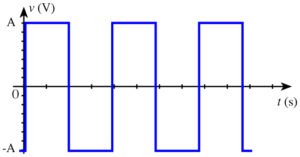
Un G.B.F. (Générateur de basses fréquences) permet de délivrer un signal avec la fréquence désirée sous forme de sinusoïdes, de créneaux (signal carré), ou de triangles.
 Nous allons ainsi envoyer un signal à l’Arduino. Celui-ci pourra ensuite mesurer la fréquence du signal d’entrée.
Nous allons ainsi envoyer un signal à l’Arduino. Celui-ci pourra ensuite mesurer la fréquence du signal d’entrée.
Il est conseillé de directement relier votre GBF à un oscilloscope afin d’obtenir une image en direct du signal que vous générez.
Nous utiliserons plus tard une fonction qui permet de détecter le temps d’état haut et/ou le temps d’état bas d’un signal. Nous devons donc générer un signal carré.