

Le driver ULN2003 permet de piloter un moteur pas à pas. Nous allons étudier son principe de fonctionnement sous Arduino.

Ce moteur pas à pas possède 4 phases. Le réducteur est de 1/64. Ce moteur peut ainsi être positionné sur une valeur angulaire précise.
Caractéristiques :
– Tension d’alimentation 5V continu (DC)
– Moteur pas à pas à 4 phases (4 fils + masse)
– Avec engrenages interne de réduction 1/64 (augmente le couple)
– 64 pas par tour, angle de pas 5.625 °
– Couple de rotation : > 34.3mN.m (~340 g.cm)
Il est préférable d’utiliser une alimentation externe de 5V, et de ne pas utiliser l’alimentation de l’Arduino.
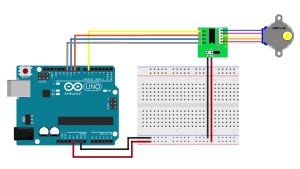
Montage :
Le programme suivant permet de faire tourner le moteur dans un sens, sur un tour, d’attendre 2s, puis de faire tourner le moteur dans l’autre sens, également sur un tour. Pour rappel, pour faire un tour, le moteur effectue 2048 pas.